Third Eye Project
Blind people face many problems every day and not being able to see and detect obstacles in front of them is a major one. Eyes helps us to see things and fortunately, most of us are blessed with two working eyes, but not everyone is. So, as an innovator, it’s our responsibility to support and take care of those who are unable to sense things in front of them from far away as normal eyes do.

In this project, we are going to make a third eye for the blind people which enables them to sense and detect walls, obstacles, or other people in front of them without the need of physical touch.
Step 1: Collecting the Components Required for this project.
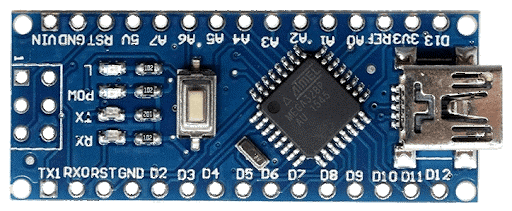
- Arduino nano with cable.
- HC-SR04 Ultrasonic Sensor
- Vibration Motor
- Buzzer
- Jumper Wires
- 9V DC Battery
You can buy all these components with instructions by clicking here



Step 2: Assembling the Components – Circuit Design

Connect all the components with the required wires as shown in the above diagram
Connection Table:
| Arduino Nano | Ultrasonic Sensor |
| A4 | Trig |
| A5 | Echo |
| 5V | Vcc |
| GND | GND |
| Arduino Nano | Buzzer |
| D13 | + |
| GND | – |
| Arduino Nano | Vibration Motor |
| D9 | + |
| GND | – |
| Arduino Nano | Battery |
| Vin | + |
| GND | – |
Step 3: Uploading the Code in the microcontroller (Arduino Nano)
1. Connect the Arduino nano to PC or laptop with the given USB cable.
2. Open Arduino IDE or download it from here.
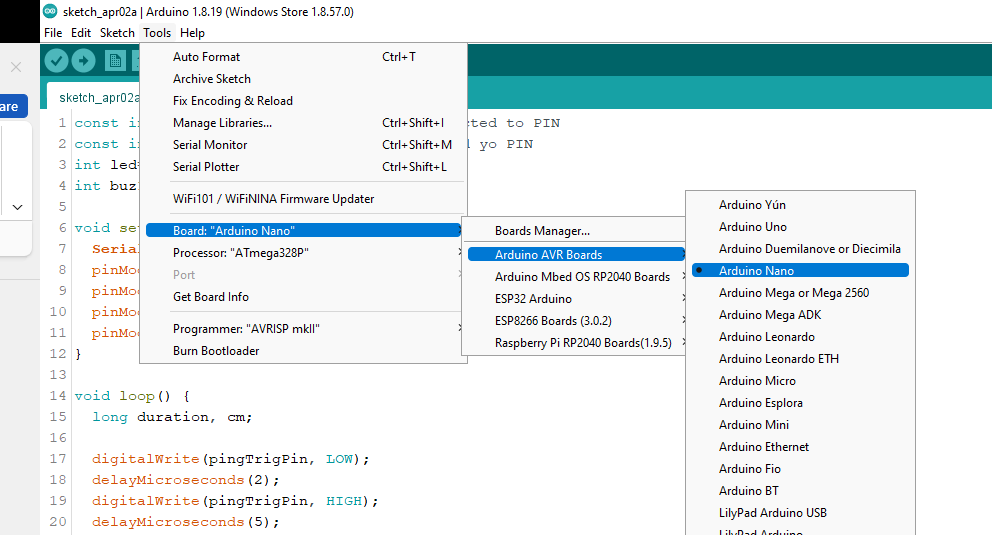
3. Go to tools > board: > Arduino AVR Boards and select “Arduino Nano”.
4. Select the COM Port

5. Copy and paste the code given below in the Arduino IDE and hit Upload

const int pingTrigPin = A4; //Trigger connected to PIN
const int pingEchoPin = A5; //Echo connected yo PIN
int led=13; //Buzzer to PIN 4
int buz1=9;
void setup() {
Serial.begin(9600);
pinMode(led, OUTPUT);
pinMode(buz1, OUTPUT);
pinMode(pingTrigPin, OUTPUT);
pinMode(pingEchoPin, INPUT);
}
void loop() {
long duration, cm;
digitalWrite(pingTrigPin, LOW);
delayMicroseconds(2);
digitalWrite(pingTrigPin, HIGH);
delayMicroseconds(5);
digitalWrite(pingTrigPin, LOW);
duration = pulseIn(pingEchoPin, HIGH);
cm = microsecondsToCentimeters(duration);
if(cm<=100 && cm>0) {
int d= map(cm, 1, 300, 10, 1000);
digitalWrite(led, HIGH);
digitalWrite(buz1, HIGH);
delay(50);
digitalWrite(led, LOW);
digitalWrite(buz1, LOW);
delay(d);
}
Serial.print(cm);
Serial.print("cm");
Serial.println();
delay(40);
}
long microsecondsToCentimeters(long microseconds) {
return microseconds / 29 / 2;
}
Thank you for learning with us. We hope all the steps and details are easy to understand. You can try to make your own Third Eye by purchasing our kit for this project from the given link.
Video Demonstration 1
Video Demonstration 2
If you face any problem while making this project, please leave a comment down below.
Viva Questions from SR Robotics:
- What is the frequency of Ultrasonic Sensor?
- 1 KHz
- 10 KHz
- 20 KHz
- 40 KHz
Ans: 40 KHz, any Sound frequency Higher than humans can detect is called ultrasonic Sound.
- What is the range of frequency of sound humans can detect?
- From 1 Hz to 1000 Hz
- From 10 Hz to 10 KHz
- From 20 Hz to 20 KHz
- From 40 Hz to 40 KHz
Ans: From 20 Hz to 20 KHz, some animals can hear a lot wider range of frequencies.
- What is the operating voltage of the third eye system?
- 3 Volts
- 5 Volts
- 9 Volts
- 12 Volts
Ans: 5 Volts, the system works on 5 Volts but the supplied power by battery is 9 volts which is changed to 5 Volts by voltage regulator installed in Arduino Nano board.
- What is the working principle of ultrasonic sensor?
- Reflection of Light
- Refraction of Light
- Reflection of Sound
- Refraction of Sound
Ans: Reflection of Sound, which is also known as echo.
- What is the approximate frequency of Vibration Motor?
- 10 Hz
- 60 Hz
- 120 Hz
- 180 Hz
Ans: 180 Hz, most vibrations are ranged from 130 to 200 Hz but mostly around 180 Hz.
- How does an ultrasonic sensor calculate the distance of an object?
An ultrasonic sensor transmits the ultrasonic waves with frequency 40 KHz and simultaneously microcontroller starts the clock.
The ultrasonic wave travels to the object, get reflected back by the object and again travels towards the sensor
The clock stops and measures the time interval at the moment ultrasonic waves are detected back by the receiver part of the sensor.
Now, microcontroller calculates the distance of object by using this time interval and as speed of sound is constant in air. The distance is calculated using:
Distance = Speed × Time
This is the distance travelled by the ultrasonic wave but the actual distance between sensor and object is half of this distance as the wave also travelled all the way back too. So,
Distance = Distance / 2
Now this distance is the actual distance between Sensor and the object.
